Drone projects
Our UAV stand out
We are heading towards new and smart Aviation innovations.
Below R&D projects on which we are working on. They are on different stage of testing phase and completion.
Our goal is to
Reach robustness
Design and tests different types of multivariable controllers algorithms Hinf / LQR to make UAV flight more stable and more accurate and noise resistant.
In Unmanned Aerial Vehicles flight control system is based on two algorithms which are executed in parallel. The first algorithm (higher frequency inner loop) is responsible for Flight Stabilization. The second algorithm (external control loop with lower frequency rate) is responsible for Navigation and guidance of unmanned vehicle
Flight Stabilization is based on control state variables (pitch, yaw, roll angles together with their velocity measurements. The gyroscopes (IMU) and accelerometers are used as sensors to measure control variables, while the ailerons, rudder and elevator together with engine/propeller (for fixed-wings drones ), engines/proppelers thrust (for qudrocopters) are used as an actuators.
In the most of the application and commercial drones PID (Proportional Integrated Derivative) controllers are utilized to stabilize separately each of DOF variable ( separate controller for stabilize pitch, yaw and roll angle and follow the command set points).
CosmicFly develops and tests Stabilization control (internal loop) which is based on multivariable approach which differs from PID design. Innovation of such multivariable control system approach:
In our solution, the unique shape of the piston and cylinder create a pre-compression chamber. The fuel-air mixture is drawn into this chamber during the upward stroke of the piston and does not pass through the engine crankcase. During the downward stroke of the piston, after the intake valve closes, the charge is compressed and then, after the ports are exposed, pushed into the combustion chamber proper.
Our goal is to
Extend boundaries
LM Awiacja with JJsDesigm and GGTech the CosmicFLy partner have their own engine design. Two patents have been issued, covering a total of 23 patent claims. A special feature of our engine is the unique shape of the piston.
The main advantages of our solution
01
More boosting
The pre-compression chamber has a larger, freely scalable volume than the combustion chamber. This ensures better combustion chamber scavenging, charge exchange, and boosting.
02
Stable ports
The ability to optimize the ports and exhaust ports, resulting in better charge exchange = greater power
03
Adaptable
The engine can be built in any configuration (inline, V, boxer, radial, etc.), which is impossible with a traditional two-stroke
04
More power, less toxic
Thanks to improved charge exchange, not only does it achieve greater power and efficiency but also minimizes the fundamental drawback of two-strokes – exhaust gas toxicity
05
Perfect cooling
The pre-compression chamber surrounds the piston and cylinder, and the forced circulation of cold air ensures effective cooling even if airflow outside the engine is impeded
Predict
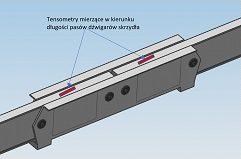
Heather Industries CosmicFly partner develops technology and a prototype of a system for monitoring and predict fatigue life of structural elements based on data fusion from a networking of integrated sensors.
The target groups for the developed technology are entities for which maintaining the structural integrity of infrastructure and machinery is essential to ensuring business continuity, particularly in the aerospace, petrochemical, and energy industries.
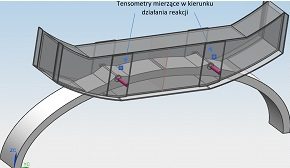

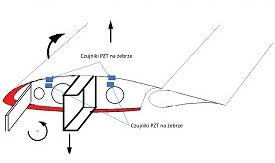
The project’s goal is to be achieved by fusion of data from integrated sensor networks and the following sensor technologies:
using advanced signal analysis and machine learning methods. The project is aimed at achieving Technology Readiness Level VII. The project plans to demonstrate the capabilities of the developed technology as a monitoring system for modern structures, based on Industry 4.0 assumptions. It is planned to investigate the possibility of damage detection for a wide range of materials:


Our goal is to
Build THE real things
CosmicFly is preparing three different UAV designs: Fox, Tern and Uvanisoptera. All three projects have customized and specific functionality. Here our team is focusing on certain abilities which are essential for different aims defined in this R&D projects.
All designed advanced solutions and electronic components which we create for more robust stabilization and navigation precision we apply in new UAV design. CosmicFly wants to apply innovated multivariable control strategy, new patented engine (LM Awiacja), and fatigue life monitor application (Heather Industries) in the real tested aviation and aerospace unmanned vehicles.
Our goal is finalized design and test prototypes of three different UAVs.

FOX Drone (bsp Lis).
Due to specific fuselage design and very powerful dual propeller-engine system, the Fox fixed-wings drone prototype could have load capacity up to 240lb. Fox design is based on glider fuselage with two electrical DC engines mounted on its wings . It has an innovative hybrid motor system, which includes 2-storke very efficient and heavy duty engine (LM Awiacja) which works as power generator for two DC motors. This drone can be utilized for many different tasks for civilian as well as military applications. Fox original was designed for scattering vaccines for foxes in the wild forest areas. However it could be also use as unmanned plane for farmer’s field spraying or as a platform for fast transporting human organs. Due to its very precise control system and high load capacity in parallel to civil applications Fox might serve as multitasks’ military platform.
Main specification of Fox drone project are: high capacity load 240 lbs (120 kg), flight time up to: 2 hours (depends on configuration), speed 120 km/h
TERN Drone (bsp Rybitwa).
Due to specific fixed-wings design combined with innovative hybrid drive system the Tern drone could flight several hours. During flights prototype of the Tern UAV will be equipped with stress monitoring diagnostic system, designed and tested by Heather Industries.
Main specification of Tern drone project are: very high control range 30 km (mission control up to 500 km) , flight time up to: 5 hours (depends on configuration), payload 20kg.


UVANISOPTERA drone (bsp Ważka).
Due to specific wings arrangement of dragonfly and its insects size the Anisoptera UAV is very compact and small. After his wings are closed it would be equipment for easy pocket-carry, It can be used for short distance inspections of hard access and hazardous areas and zones i.e.: pipes, tanks, other spaces not accessible for humans due to their restriction health hazard, etc.
Main specification of this mcro Ansoptera drone project are: very light and compact design, range 30 meters, flight time 10 minutes, accu 3.7V (with EXd design to work in flameproof zones), online FVP camera , Gyro stabilization, micro SD, possible APP mobile control.